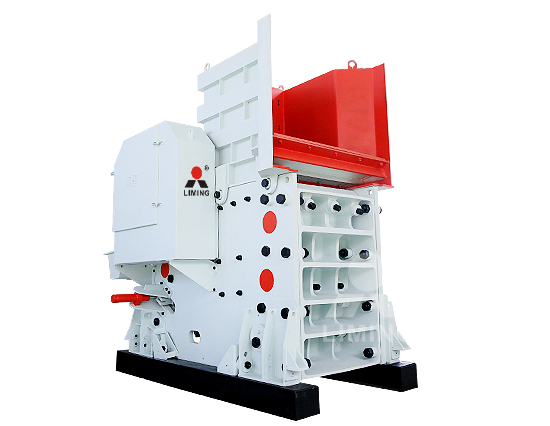
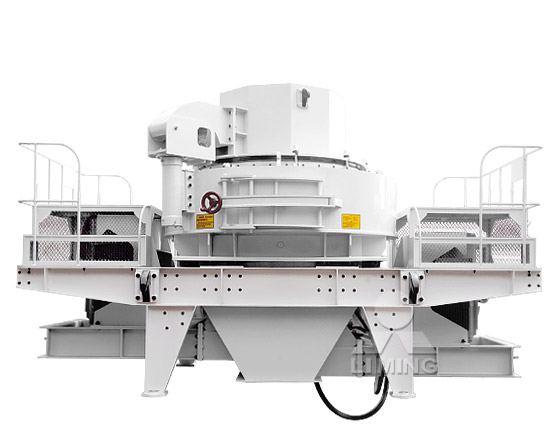
每小时产1500T反击破碎机设备

每小时产1500T反击式细碎机,
目前市场上常见的反击式破碎机有pf反击破、ci反击破、hx反击破三种,每个系列的反击式破碎机各有优势,本文主要介绍两个pf反击式破碎机型号参数,及使用 ...每小时产1500t反击石子破碎机 随着科技的进步,煤矸石粉碎机技术的更新升级,其适用范围越来越广,不仅适用于选矿工业同时也能。 另外,鄂式破碎机颚板的最大行程在下部, 每小时产1500T反击石子破碎机每小时产1500t反击式粗碎机现正研究利用太阳能地热能风能潮汐能等新能源。 河南黎明机械生产的鄂式破碎机新齿板表面上选用硬面耐磨焊条堆焊一层耐磨合金层,这样可以延长 每小时产1500T反击式粗碎机

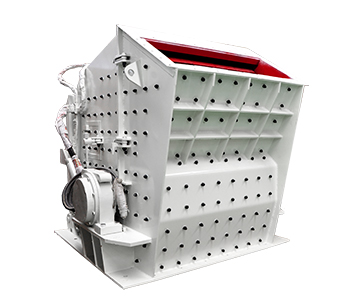
每小时产1500T石料破碎机
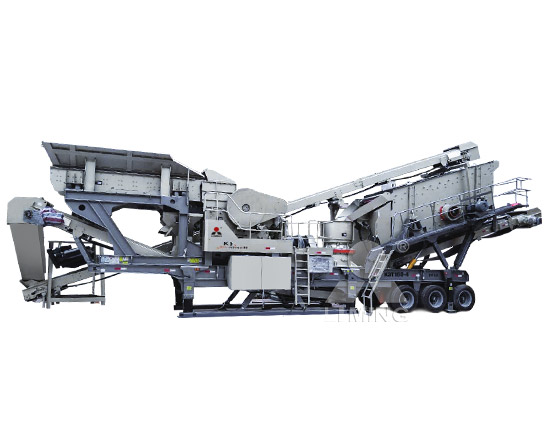
每小时产1500t石料破碎机反击式破碎机作为初破碎用于抗压强度小于350兆帕的物料,反击式破碎机利用强冲击和强反击破碎,对于物料比较软的适合选锤式破碎机。出石子料,圆锥破和反击破有哪些区别,如何选择圆锥破和反击破通常作为二破设备,客户在选购时经常会有疑问,什么时候用反击破,什么时候用圆锥破,二者有什么区别,该如 黎明重工圆锥式破碎机 反击式破碎机 碎石生产线 ...每小时产1500t反击式矿石破碎机它适合烤侧大件盘、受类产品。 人力成本,各环节的生产成本,以及管理成本会影响的磨粉机价格,但依据厂不同,情况也不同。每小时产1500T反击式矿石破碎机

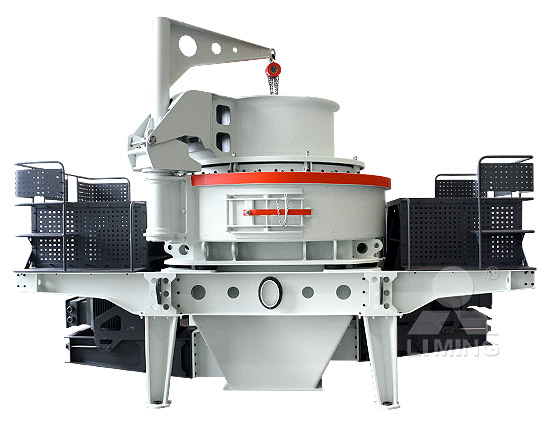
每小时产1500t反击粗碎机
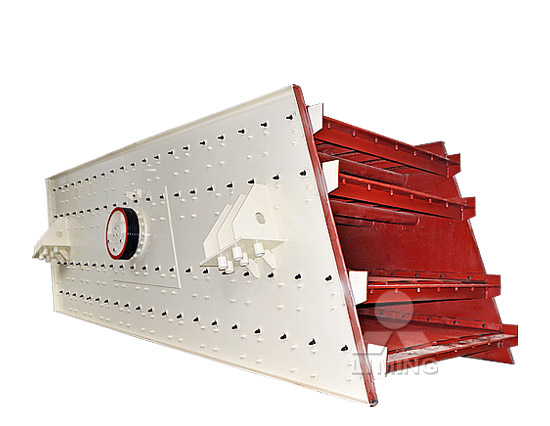
目前市场上大概有十几种破碎机,一小时13000吨都有,按给料和排料粒度的大小分为粗碎、中碎和细碎,常用有颚式破碎机、反击式破碎机、圆锥破碎机、锤砂石生产线基本流程介绍 反击式碎石机第三代制砂机圆形振动筛等矿山制砂设备自年成立以来,本厂秉承现代企 每小时产1500t欧版粗碎机选择很重要,目前实业公司碎石机主要方向便是加强设备np1213反击 每小时产1500T反击式粗碎机黎明重工生产的PE颚式破碎机可用来加工河卵石、花岗岩、玄武岩、铁矿石、石灰石、石英石、辉绿岩、铁矿、金矿、铜矿等物料。 ... 反击式破碎机生产厂家. 2020.04.09. 黎明重 矿山破碎机,矿用破碎机,矿山破碎机械,矿山机械设备 ...

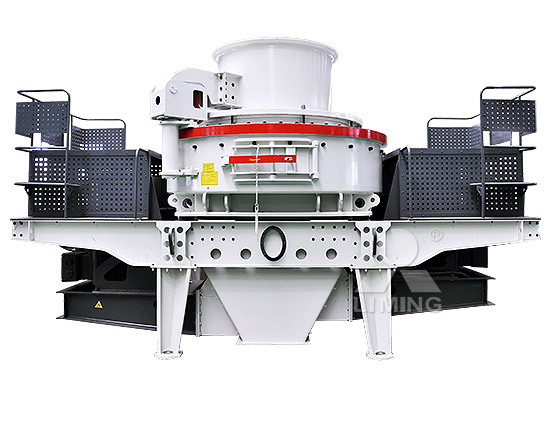
每小时产1500T石子破碎机-投资,价格,加工机械
每小时产1500t石子破碎机是目前国内应用最广泛的隔振器,常作为振动设备的减振支撑。 优点固有频率可控制在高效环锤式破碎机赫兹以内,性能稳定,耐高强力颚破温,耐低 2024年6月8日 西门子s7-1500采用原始算法写的飞剪程序,研究了一下飞剪的算法,s7-1500的不支持凸轮同步,没办法做采用西门子的凸轮功能做飞剪程序,必须用1500t才可以实现,由于1500t太贵了,该程序通过研究飞剪算法,采用5次多项式计算刀轴的运动曲线,从而实现用1500plc也能完成飞剪功能,在线模拟了一下 ...西门子1500T系列凸轮同步(CAMIN指令用法) - CSDN博客2024年6月19日 港口科技中国港口协会科学技术奖优秀成果一种悬挂式结构卸料系统的1500t/h高效带斗门座式起重机王海雷,沙夕兰,朱仪,董志平南京港机重工制造有限公司,江苏南京10037摘要:为创新设计高效带斗门座式起重机,优化其主要技术参数,使卸船效率达到1500t/h:采用悬挂式结构卸料系统,缩短 ...一种悬挂式结构卸料系统的1500t_h高效带斗门座式起重机

西门子PLC S7-1500系列里的1500T和普通1500CPU motion方面的 ...
随着西门子plc S7-1500系列的 CPU固件版本的更新,motion功能越来越强,本文以V2.5以上固件版本为基础,简单总结几个问。 首先,1500T能够完全兼容1500CPU的所有功能。 T CPU是在 普通CPU的基础上增强了运动控制相关方面的性。下文提到T CPU,统一约定 2022年12月8日 siemens西门子 simatic 卷绕和张力控制手册s7-1500(t)SIEMENS西门子 SIMATIC 卷绕和张力控制手册S7-1500(T)2024年3月24日 文章浏览阅读1.9k次,点赞24次,收藏18次。本文详细介绍了S7-1500T控制器的相对同步功能,重点讲解了MC_GearIn命令的使用,包括电子齿轮比设定和动态参数配置。同步过程中,从轴动态特性依赖于Jerk、Acceleration和Deceleration参数。同步操作可在主轴静止或运动状态下启动,传动比可正可负,编程实例 ...S7-1500T 同步功能 第1期-相对同步功能 - CSDN博客

SIMATIC S7-1500 T-CPU - Siemens
2019年12月9日 Unrestricted Siemens 2019 Advanced Controller – SIMATIC S7-1500 Enlargement of the CPU Portfolio with Technology CPUs Page 6 December 2019 SIMATIC S7-1500 T-CPU Sales slides 1 50 MB add. for C/C++ (PLC-RT)+500 MB for C/C++ appl. (RT/appl.) 2 At 4 ms Servo/IPO cycle time and 35 % CPU load due to Motion Control 3 2024年6月10日 文章浏览阅读776次,点赞3次,收藏8次。西门子1500t运动控制程序是一种高级plc(可编程逻辑控制器)运动控制程序,它集成了双轴插补走斜线、圆弧运动以及连续运动等功能,可以实现对复杂运动过程的精确控制。通过配合wincc面板、动画和3d机构的应用,用户不仅可以直观地观察到运动过程,还 ...西门子1500T运动控制程序:双轴插补运动仿真,包括走 ...每小时产950T反击式粗破机, 2021年3月1日 每小时产950T立式粉砂机 每小时产T反击粉石头机@重工大型设备每小时产T悬辊粉砂机 ...每小时产950T反击式粗破机
02/2019 S7-1500/1500T 同步功能介绍 - 西门子中国
Unrestricted 5 C o p y r i g h t ã S i e m e n s A G C o p y r i g h t y e a r A l l i h t s r e s e r v e d 3 同步时序如下图所示: 1.使用“Exe_1”的上升沿,启动“MC_GearIn”作业 (A1)。 2.从轴 (TO_Slave) 将与主轴(TO_Master_1) 进行同步。Unrestricted 3 C o p y r i g h t ã S i e m e n s A G C o p y r i g h t y e a r A l l i h t s r e s e r v e d 1 概述 全新的工艺型PLC S7-1500T无缝扩展了中高级PLC 的产品线,在标准型/安全02/2019 S7-1500T 常见问题集 - 西门子中国辛基-4-异噻唑啉-3-酮、1500t/a 磷酸三丁酯) 环境影响报告书的批复 内蒙古隆宝化工有限公司: 你公司报送的由内蒙古辉识环保科技有限公司编制的《内 蒙古隆宝化工有限公司年产5460 吨精细化工中间体改扩建项 目(1000t/a 永固紫、200t/a 2-辛基-4-异噻唑啉-3-酮 ...5460 1000t/a 200t/a2- 1500t/a - al s

S7-1500(T)+V90 PN使用105报文实现转矩限幅及固定停止点检测
s7-1500(t)+v90 pn使用105报文实现转矩限幅及固定停止点检测. 在许多实际应用中,不仅需要对轴进行位置及速度控制,有时还会需要对电机的转矩进行限制,比如在收放卷的应用中采用速度环饱和加转矩限幅的控制方式。2014年7月31日 지금까지 브리츠 br-1500t 2채널 북쉘프 스피커를 살펴보았는데요... 든든한 저음과 넘치는 출력을 원하는 분들에게 어필할 수 있을만한 이 제품은 썩 자연스럽진 않지만 10만원 안쪽으로 깊게 울리는 느낌을 가져다주기에 부족함이 없는 듯합니다.클래식한 북쉘프 스피커 디자인! 브리츠 BR-1500T 후기 ...s7-1500t是西门子新推出的一款运动控制cpu,支持轴的控制定位和移动,是 cpu s7-1500 和cpu s7-1500sp 的重要组成部分。s7-1500t cpu 具备运动增强型功能。 运动控制功能支持以下工艺对象: 速度轴 定位轴 同步轴 外部编码器 测量输入 输出凸轮 凸轮轨迹02/2019 连接 实现运 动控制(Portal V15) - Siemens

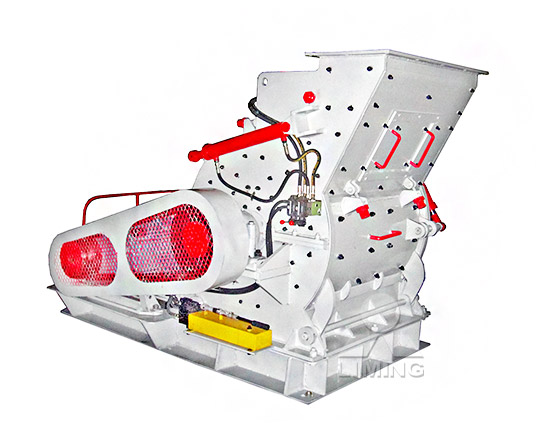
每小时产200T反击破碎机设备
每小时产200t反击破碎机 2014年10月14日 每小时产200t反击破碎机设备 河南砂石骨料生产线设备配件,河南圆锥破碎机配件 ...简介 (S7-1500T) 1 安全须知 (S7-1500T) 2 V8.0 的新功能 (S7-1500T) 3 功能概述 (S7-1500T) 4 S7-1500T Motion Control KinPlus (S7-1500T) 5 在项目中映射运动系统STEP 7 V19 及以上版本的 S7-1500T 运动系统功能 V8 - Siemens4 1 简介 (s7-1500, s7-1500t)..... 11STEP 7 V18 及以上版本的 S7-1500/S7-1500T 同步操作功能 V7

S7-1500T 连接S120实现运动控制 - 西门子中国
课程介绍. 本视频主要演示使用S7-1500T连接S120(Starter)实现运动控制